2014-08-29宜蘭 mission fly
天氣晴, 微風,約1級
上次的navigation 去龜山島, 去的時候一直搖, 回來沒有搖, 這個今天有做些調整:
這次的計畫是在一個區域內做搜尋的飛行,路線規畫是先在APM畫出一個polygon,之後用auto WP grid去做....

黃色是第一次飛的, 一樣左搖右晃, 兩個方向都一樣.....
藍色是叫回來加大roll的P gain, 飛出去還是一樣晃,就再叫回來增加P gain, 結果就時紅色的上兩排,一樣晃, 空中增加period, 可以看見紅色的最後兩排搖的小點了.....
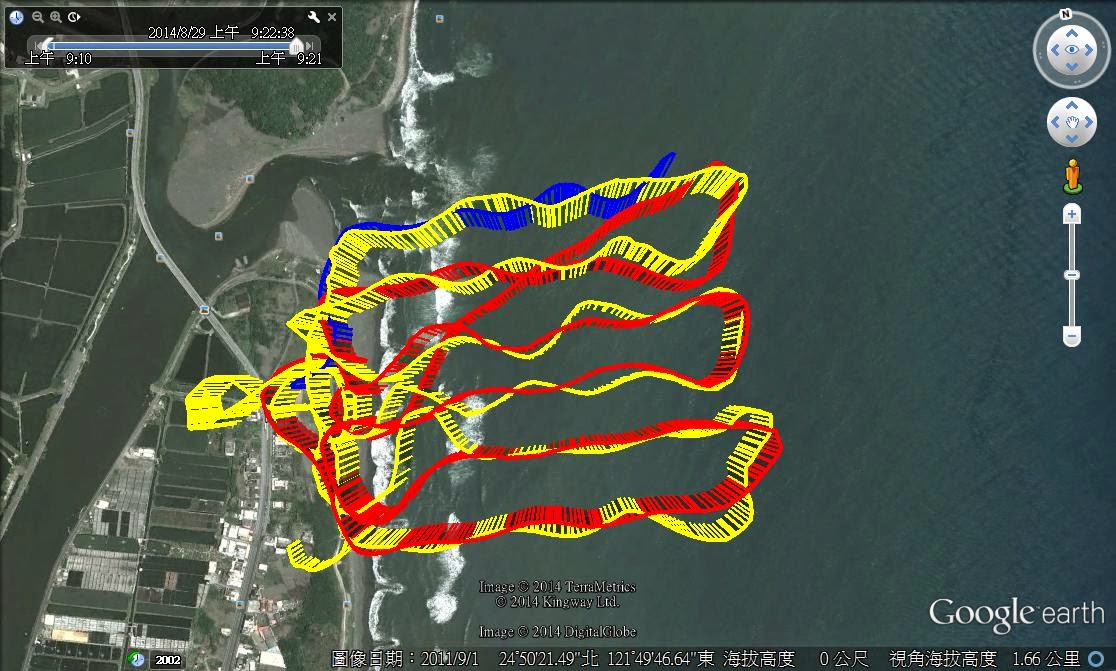
顯然navigation的 period跟damping 要再看一下怎麼調.....
tlog抓出的資料,是一開始建立聯線的,不包括後來飛行中改的,
NAVL1_PERIOD 15
上次的navigation 去龜山島, 去的時候一直搖, 回來沒有搖, 這個今天有做些調整:
這次的計畫是在一個區域內做搜尋的飛行,路線規畫是先在APM畫出一個polygon,之後用auto WP grid去做....
黃色是第一次飛的, 一樣左搖右晃, 兩個方向都一樣.....
藍色是叫回來加大roll的P gain, 飛出去還是一樣晃,就再叫回來增加P gain, 結果就時紅色的上兩排,一樣晃, 空中增加period, 可以看見紅色的最後兩排搖的小點了.....
顯然navigation的 period跟damping 要再看一下怎麼調.....
tlog抓出的資料,是一開始建立聯線的,不包括後來飛行中改的,
NAVL1_PERIOD 15
NAVL1_DAMPING 0.78
這是飛完後的數字:
NAVL1_PERIOD,20
NAVL1_DAMPING,0.778
RLL2SRV_D,0.0363633
RLL2SRV_I,0.0283633
RLL2SRV_IMAX,2000
RLL2SRV_P,0.61
RLL2SRV_RMAX,60
RLL2SRV_TCONST,0.5
http://plane.ardupilot.com/wiki/navigation-tuning/ 說:
這是飛完後的數字:
NAVL1_PERIOD,20
NAVL1_DAMPING,0.778
RLL2SRV_D,0.0363633
RLL2SRV_I,0.0283633
RLL2SRV_IMAX,2000
RLL2SRV_P,0.61
RLL2SRV_RMAX,60
RLL2SRV_TCONST,0.5
http://plane.ardupilot.com/wiki/navigation-tuning/ 說:
Steps to tuning the L1 controller
- Make sure you have already tuned the roll and pitch controller, correctly trimmed your plane, and have ensured the plane does not gain or lose altitude in turns
- Make sure you have setup LIM_ROLL_CD to an appropriate value for the bank angle you are comfortable with your plane flying without stalling. For slow flying electric gliders a value of around 5000 (50 degrees) is a good start. For fast flying aerobatic planes you may wish to use a larger value, such as 6500 (65 degrees).
- Setup a rectangular mission for your plane to fly, with a loop so it repeats the mission continuously. Ensure that the size of the mission is small enough that you will have a good view of the aircraft at all times
- Set NAVL1_PERIOD to the default value of 25, and NAVL1_DAMPING to the default value of 0.75. Set WP_RADIUS to the distance your plane would fly in 2 seconds at cruise speed.
- Takeoff and put the plane in AUTO using your transmitter switch
- Observe the behaviour of the plane in the turns. If it turns too slowly then reduce NAVL1_PERIOD by 5. If it is “weaving” after a turn then increase NAVL1_PERIOD by 1 or 2
- If you are tuning for maximum performance, once you have completed the tuning of NAVL1_PERIOD you can increment NAVL1_PERIOD by 1 and then increase NAVL1_DAMPING in increments of 0.05 to get the response you want. Do not decrease NAVL1_PERIOD too much – it is unlikely you will need a value below 0.6.



留言
張貼留言