Not really a F4BY and not exactly a mini PIXhawk...but finally make it work...with ardupilot and jumper T18
I was looking for a mini type of pix4, 3dr pixhawk was expensive, i don't want a pix racer.
Radio link mini pix does not have good reputation...
I search on tao-bao, and found this:
Radio link mini pix does not have good reputation...
I search on tao-bao, and found this:
YRrc

I though it's a copy of mini px4, but no, it's not....
it's acturally a copy of F4BY : http://swift-flyer.com/?page_id=83
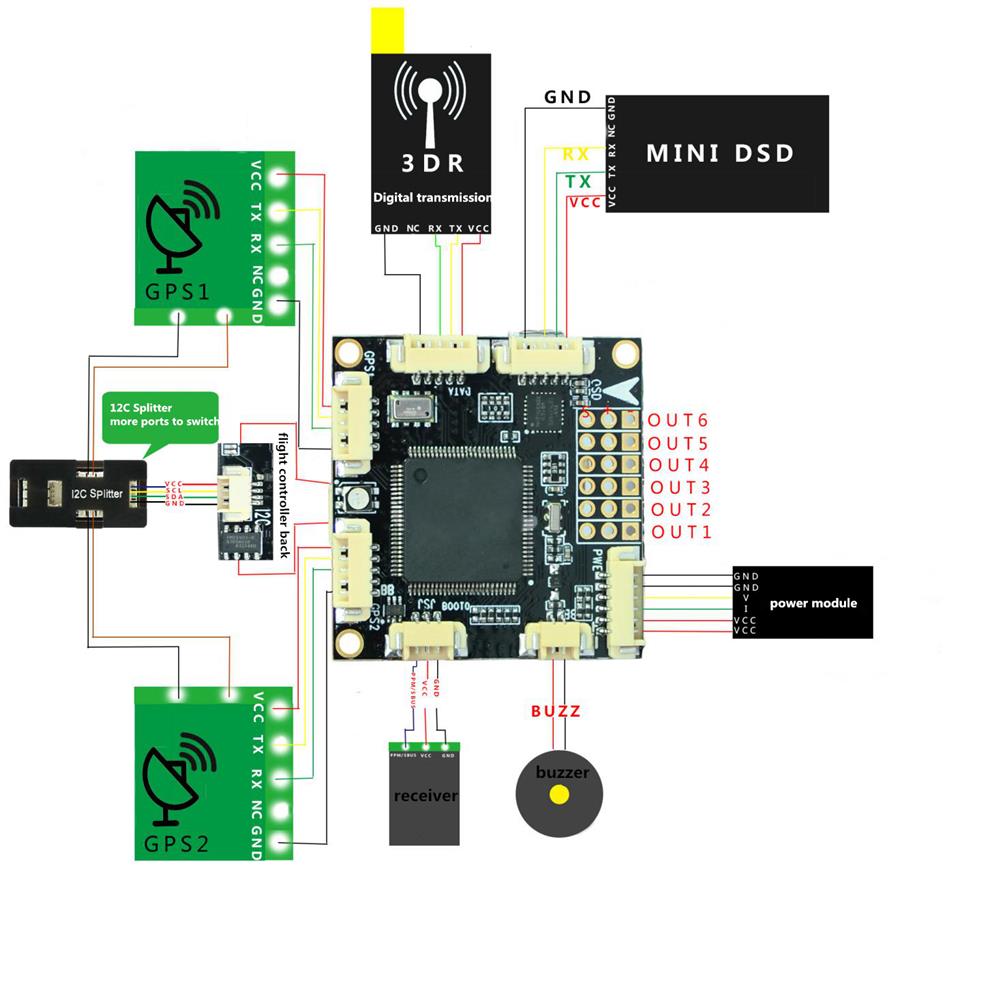
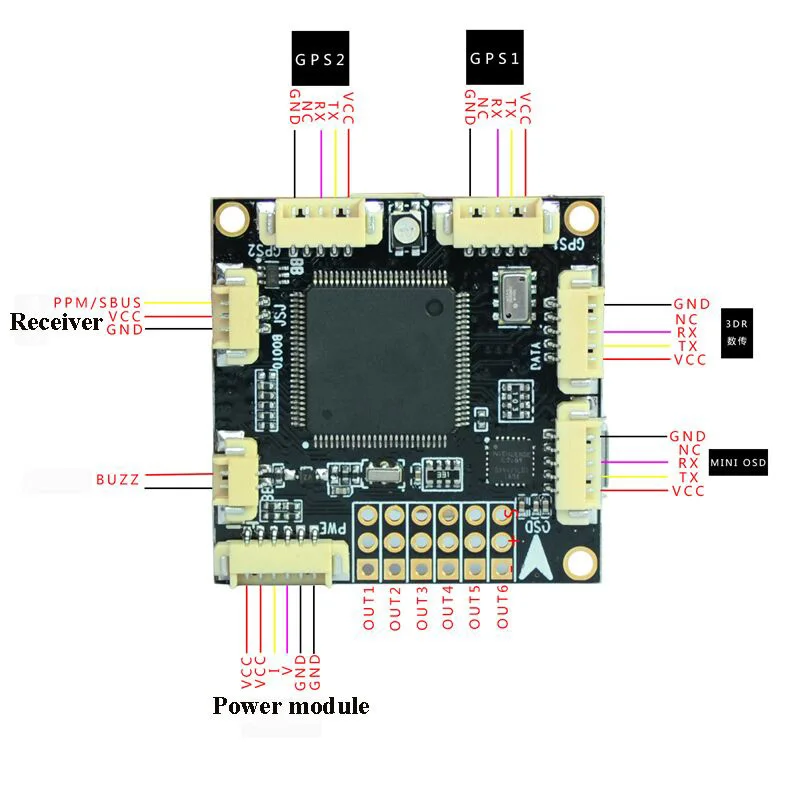
but the marking and the connection chart I found(on taubau or bangood) as this one below is not correct.
F4BY is supported by ardupilot https://ardupilot.org/copter/docs/common-autopilots.html

power module connection seems to be good, as well as buzz



FMU Processor: SMT32f407(32bit Arm Cortx-M7 168Mhz)
Sensor:
Gyroscope: ICM-20689
Accelerometer: ICM-20689
Barometer: MS5607
Compass: IST8310
Support for three at most, 1 x Compass with built-in, 2x External support two at most.
Sensor:
Gyroscope: ICM-20689
Accelerometer: ICM-20689
Barometer: MS5607
Compass: IST8310
Support for three at most, 1 x Compass with built-in, 2x External support two at most.
I though it's a copy of mini px4, but no, it's not....
it's acturally a copy of F4BY : http://swift-flyer.com/?page_id=83
but the marking and the connection chart I found(on taubau or bangood) as this one below is not correct.
F4BY is supported by ardupilot https://ardupilot.org/copter/docs/common-autopilots.html
the firmware like this:
2020/1/12 上午 11:34:14 : F4BY 001E0024 35374703 36353030
2020/1/12 上午 11:34:14 : ChibiOS: d2030d88
2020/1/12 上午 11:34:14 : ArduPlane V3.9.8 (6ea22c9c)
To upgrade the firmware, refer to this:
https://ardupilot.org/copter/docs/common-loading-chibios-firmware-onto-pixhawk.html
when down loading the firmware, you need to download also the arduplane.apj file, and place it together with the hex, file, there are 2 hex files, I use the one with "bl" bootloader.
after loading new one, connect again, and in the messages windows, it shows the updated:
2020/1/12 上午 11:49:53 : F4BY 001E0024 35374703 36353030
2020/1/12 上午 11:49:53 : ChibiOS: c477cd14
2020/1/12 上午 11:49:53 : ArduPlane V4.1.0dev (b6ef76a1)
2020/1/12 上午 11:34:14 : F4BY 001E0024 35374703 36353030
2020/1/12 上午 11:34:14 : ChibiOS: d2030d88
2020/1/12 上午 11:34:14 : ArduPlane V3.9.8 (6ea22c9c)
To upgrade the firmware, refer to this:
https://ardupilot.org/copter/docs/common-loading-chibios-firmware-onto-pixhawk.html
when down loading the firmware, you need to download also the arduplane.apj file, and place it together with the hex, file, there are 2 hex files, I use the one with "bl" bootloader.
after loading new one, connect again, and in the messages windows, it shows the updated:
2020/1/12 上午 11:49:53 : F4BY 001E0024 35374703 36353030
2020/1/12 上午 11:49:53 : ChibiOS: c477cd14
2020/1/12 上午 11:49:53 : ArduPlane V4.1.0dev (b6ef76a1)
power module connection seems to be good, as well as buzz
For battery monitoring, the pin setting is in the manual of F4BY
Current sensor input* – сенсор напряжения со встроенным делителем. При использовании блока питания с делителем 15 / 3.3kOm коэффициент BATT_VOLT_MULT = 2.2 подключение соответствует BAT_VOLT_PIN =13
Voltage sensor input **– вход сенсора тока, имеет встроенный делитель на 2 (10KOm / 10KOm). Из за использования делителя коэффициент BAT_AMP_PERVOLT свойственный датчику следует умножить на 2. подключение соответствует BAT_CUR_PIN=12.
then I do the calibration, I got parameter like this:
Serial ports
the marking on the housing is wrong and very wrong about serial ports.
this copy has different PCB layout as F4BY. but with Chibios
So, I have to test them with a lot of time...
result:
the marking on the housing is wrong and very wrong about serial ports.
this copy has different PCB layout as F4BY. but with Chibios
So, I have to test them with a lot of time...
result:
The serial ports correspond to the configuration on ardupilot 4.06

these 4 connector are all 5 pins connector. view from board to outside:
GND--NC--RX--TX--5V
I plan to use
Serial 2 as NEMA GPS @ 38400
Serial 1 as telemetry @ 921600
Serial3 as S.port @57600 frskypassthrough


2020/9/7
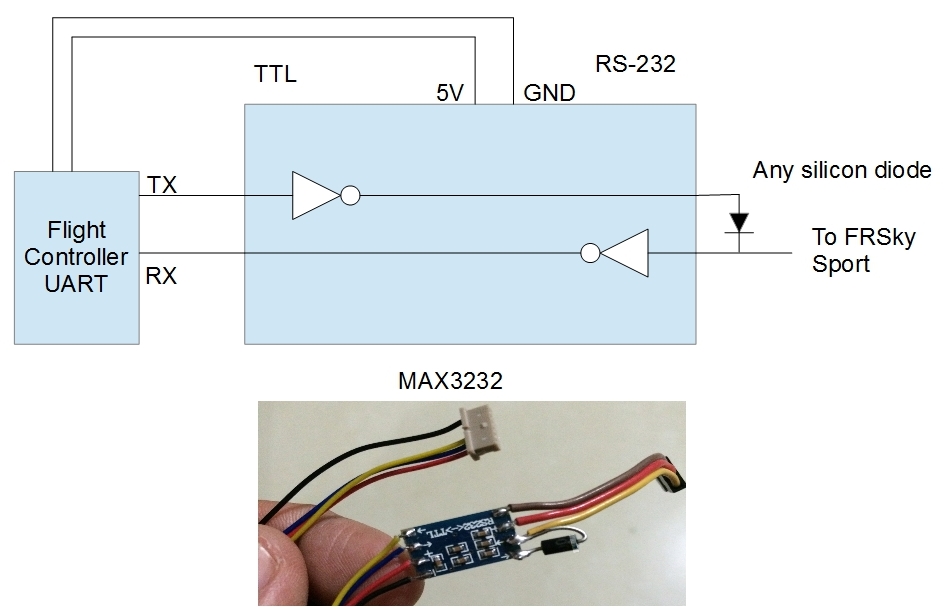 I made one with max3232 it works fine.
I made one with max3232 it works fine.

I could not get the serial port to work(marking GPS2)
these 4 connector are all 5 pins connector. view from board to outside:
GND--NC--RX--TX--5V
I plan to use
Serial 2 as NEMA GPS @ 38400
Serial 1 as telemetry @ 921600
Serial3 as S.port @57600 frskypassthrough

setting in mission planner as follow:

2020/9/7
using jumper R1 receiver, binded with T18.
For the S.port cable, refer to
With Yaapu telemetry lua on T18, I have:


Finally I got all thing set up and running.
There are a lot of FC from China, but be careful, better to buy one with good branding, and listed as supported FC in control SW.
Otherwise, it would cost you a lot of time to make it work...if you are lucky....



{kind=link}
留言
張貼留言