MAVlink and MAVProxy on beaglebone black and Pi2
I have had series of problem when installing pymavlink and mavproxy onto BBB...
There is a link for communication Raspberry pi via MAVLink:
http://ardupilot.org/dev/docs/raspberry-pi-via-mavlink.html
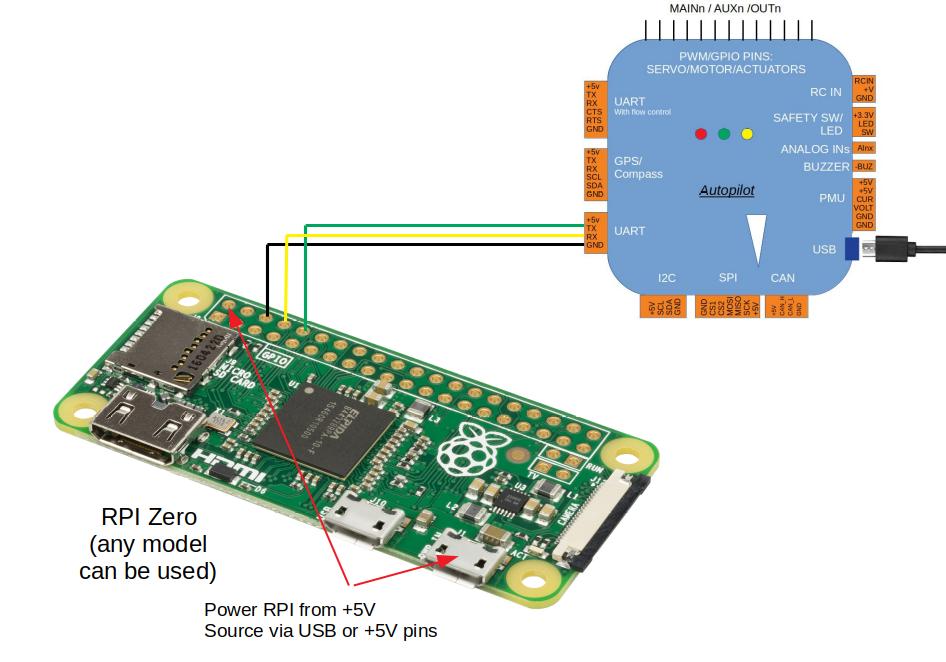
it was talking about connecting Pi through tele2, and set up a mavproxy on pi for further development.
Lot of installion of mavproxy on arm or CC refer to this page, So I take my BBB and following the installation with pip, it always comes to a gcc failed.....
But, I tried a Pi2 with Raspbian Jessie, did the apt-get update, and apt-get install dependencies,
then you need to first run pip install future...
if you don't, pip install pymavlink will stop with error: no module named future. even you saw it down load a version of future....
after this then you start:
pip install pymavlink
pip install mavproxy
or eventually pip install dronekit, all can be done.
http://ardupilot.github.io/MAVProxy/html/getting_started/download_and_installation.html
above link is the only one I got it installed on BBB and BBGreen, BBB with eMMC debian 7.8, and BBGreen boot from uSD with debian 8.3(Jessie version)
The trick is that different tutorials tested with different version of linux, and the apt-get and pip installation will also depends on the linux version to down load different dependencies. for example, with debian 7.8 and 8.3, when doing apt-get update, they link to different place for down loading.
And the pip installer will ask for different version of dependencies. For example, when pip install dronekit and install mavproxy, they as for different version of pylink.
My experience is that:
the Pi tutorial is working with pi with Jessie(8.x), so when I use BBgreen from SD card, follow the installation, only need to first apt-get install future, it will work.
then we add path:
then we add user to dialout group:
then use pip install dronekit, it will down load different version of pymavlink and future.
it will failed on bdlist_wheel for pymavlink, but it will show completion of installation of dronekit.
I tested the MAVproxy with pixhawk telemetry 2 connect to a ftdi, then plug into USB of BBGreen, it works.
But I need to expand the partition to full sd card(the system is at 3.xG, I used a 8G card) , otherwise mavproxy will tell you there is no space for log and start to upload some module.
http://ldsrc.blogspot.tw/2017/04/bbb-expand-sd-card-space.html
I have tried this http://ardupilot.github.io/MAVProxy/html/getting_started/download_and_installation.html
and the mavproxy runs correctly with a pixhawk connect to BBB's USB through telemetry2 with a FTDI.
Dronkit remain to be tested.
There is a link for communication Raspberry pi via MAVLink:
http://ardupilot.org/dev/docs/raspberry-pi-via-mavlink.html

it was talking about connecting Pi through tele2, and set up a mavproxy on pi for further development.
Lot of installion of mavproxy on arm or CC refer to this page, So I take my BBB and following the installation with pip, it always comes to a gcc failed.....
But, I tried a Pi2 with Raspbian Jessie, did the apt-get update, and apt-get install dependencies,
then you need to first run pip install future...
if you don't, pip install pymavlink will stop with error: no module named future. even you saw it down load a version of future....
after this then you start:
pip install pymavlink
pip install mavproxy
or eventually pip install dronekit, all can be done.
sudo apt-get update #Update the list of packages in the software center sudo apt-get install screen python-wxgtk2.8 python-matplotlib python-opencv python-pip python-numpy python-dev libxml2-dev libxslt-dev sudo pip install future sudo pip install pymavlink sudo pip install mavproxy
BBGreen with debian 8.3 Jessie
I then change to BBB, since it has more uart...I tried the on board EMMC with debian 7.8, with installation as Pi,it always comes to gcc error....http://ardupilot.github.io/MAVProxy/html/getting_started/download_and_installation.html
above link is the only one I got it installed on BBB and BBGreen, BBB with eMMC debian 7.8, and BBGreen boot from uSD with debian 8.3(Jessie version)
The trick is that different tutorials tested with different version of linux, and the apt-get and pip installation will also depends on the linux version to down load different dependencies. for example, with debian 7.8 and 8.3, when doing apt-get update, they link to different place for down loading.
And the pip installer will ask for different version of dependencies. For example, when pip install dronekit and install mavproxy, they as for different version of pylink.
My experience is that:
the Pi tutorial is working with pi with Jessie(8.x), so when I use BBgreen from SD card, follow the installation, only need to first apt-get install future, it will work.
then we add path:
echo "export PATH=$PATH:$HOME/.local/bin" >> ~/.bashrc
then we add user to dialout group:
sudo adduser <username> dialoutmavproxy will run....
then use pip install dronekit, it will down load different version of pymavlink and future.
it will failed on bdlist_wheel for pymavlink, but it will show completion of installation of dronekit.
I tested the MAVproxy with pixhawk telemetry 2 connect to a ftdi, then plug into USB of BBGreen, it works.
But I need to expand the partition to full sd card(the system is at 3.xG, I used a 8G card) , otherwise mavproxy will tell you there is no space for log and start to upload some module.
http://ldsrc.blogspot.tw/2017/04/bbb-expand-sd-card-space.html
BBB or BBGreen with eMMC debian 7.8
Both if they will not work following the installation with Pi.I have tried this http://ardupilot.github.io/MAVProxy/html/getting_started/download_and_installation.html
and the mavproxy runs correctly with a pixhawk connect to BBB's USB through telemetry2 with a FTDI.
Dronkit remain to be tested.



留言
張貼留言