Frsky D4R-II 8 channels receiver with telemetry part1: data search
This is an old receiver, you can still find the spec on web:
https://www.frsky-rc.com/product/d4r-ii/
Compatible with FrSky two way telemetry modules: DFT, DJT, DHT, DHT-U
manual: https://www.frsky-rc.com/wp-content/uploads/2017/07/Manual/D4R-II.pdf

If you jump CH3/4 signal pins with a jumper, it out put CPPM on ch1 and RSSI on CH2

push the button and power up, it will goes into bind mode, The I turn on my T18, select:
protocol Frsky D8 and press bind, it binds ok!
I have a invert cable for the telemetry port, this receiver is the one in iris with a pixhawk(FMUV2, which px4 refer to Pixhawk 1).
But now a day, there is not much information on this receiver.
I remember read about a D port but now what have is this page:
Also ardupilot has some info, descript the data contain by D and S port protocol
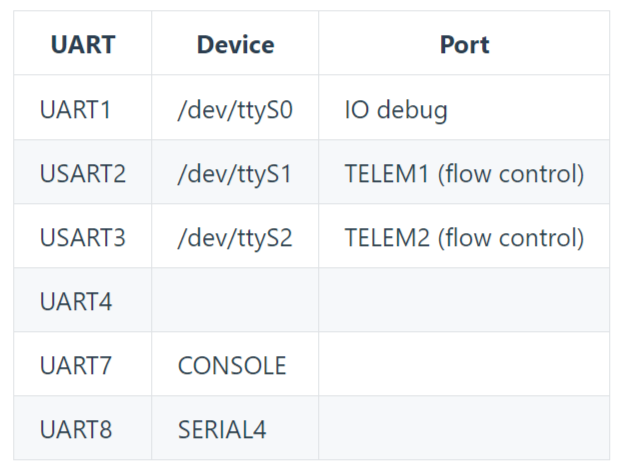
The serial mapping is confusing:

Sport lib for arduino
2015 for X and Dport:
for D port:
this confirm me that the baud is 9600
There was lot generation of telemetry with frsky, in this doc,
it class into repurposed frsky telemetry (D and Smartport) and passthrough frsky telemetry(smart port)
So, I set the Serial2(telemetry2) to 9600, frsky D, I first want to know what are the information sent by pixhawk, so I connect it to pc with ftdi and found:

But, base on what I found: this FrSky document
it says:


for temp1 andtemp2:
temp1 is for flight mode and temp2 is for gps info as in S.port
here is how these 2 are decoded: https://github.com/Clooney82/MavLink_FrSkySPort/wiki/1.2.-FrSky-Taranis-Telemetry
a new one with https://github.com/zs6buj/MavlinkToPassthru
| Tmp1 | GPS status = ap_sat_visible*10) + ap_fixtype |
| Tmp2 | Armed Status and Mavlink Messages :- 16 bit value: bit 1: armed - bit 2-5: severity +1 (0 means no message - bit 6-15: number representing a specific text |
Today, with jumper T18, I have yaapu lua, but it does not support D port, only Sport.
Inav lua still work with D port. But I did a test on it. pixhawk has gps fix, and using openTX discover new sensor, it does found gps data such as lat, lon.
But iNAV lua does not show it, but heading voltage is correct.



totally 16 sensors, I believe 1-6 comes from receiver itself.
Here is how to decode Dport with arduino:
the signal of output of TX pin of module is inverted, also the voltage need to be take cared. it use interrupt to handle the invert of signal.
it says that the packet header starts with 7E, from module on transmitter



留言
張貼留言